|
Zhaodong(Frank) Jiang I'm a final year undergraduate student at University of Toronto. I'm working with Prof. Florian Shkurti in the Robot Vision & Learning (RVL) lab. Previously, I was an intern at the Embodied AI team at Huawei Noah's Ark Lab Canada and worked with Prof. Steven Waslander at the Toronto Robotics and AI Lab (TRAIL). I was also the Tracking Team Lead at UofT's autodrive team aUToronto for year 2024-2025, where we aim at level 4 autonomous driving. Email / Scholar / LinkedIn / Github I am actively seeking a Master's/PhD position in Robotics and Computer Vision in North America for Fall 2026! |

|
Research InterestI'm interested in building robots that can reason and interact intelligently in dynamic real-world environments. My past work has focused on robot learning and perception, and I'm always excited to explore new techniques that can push robotics closer to this goal🦾. |
Publications (* denotes equal contribution) |
|
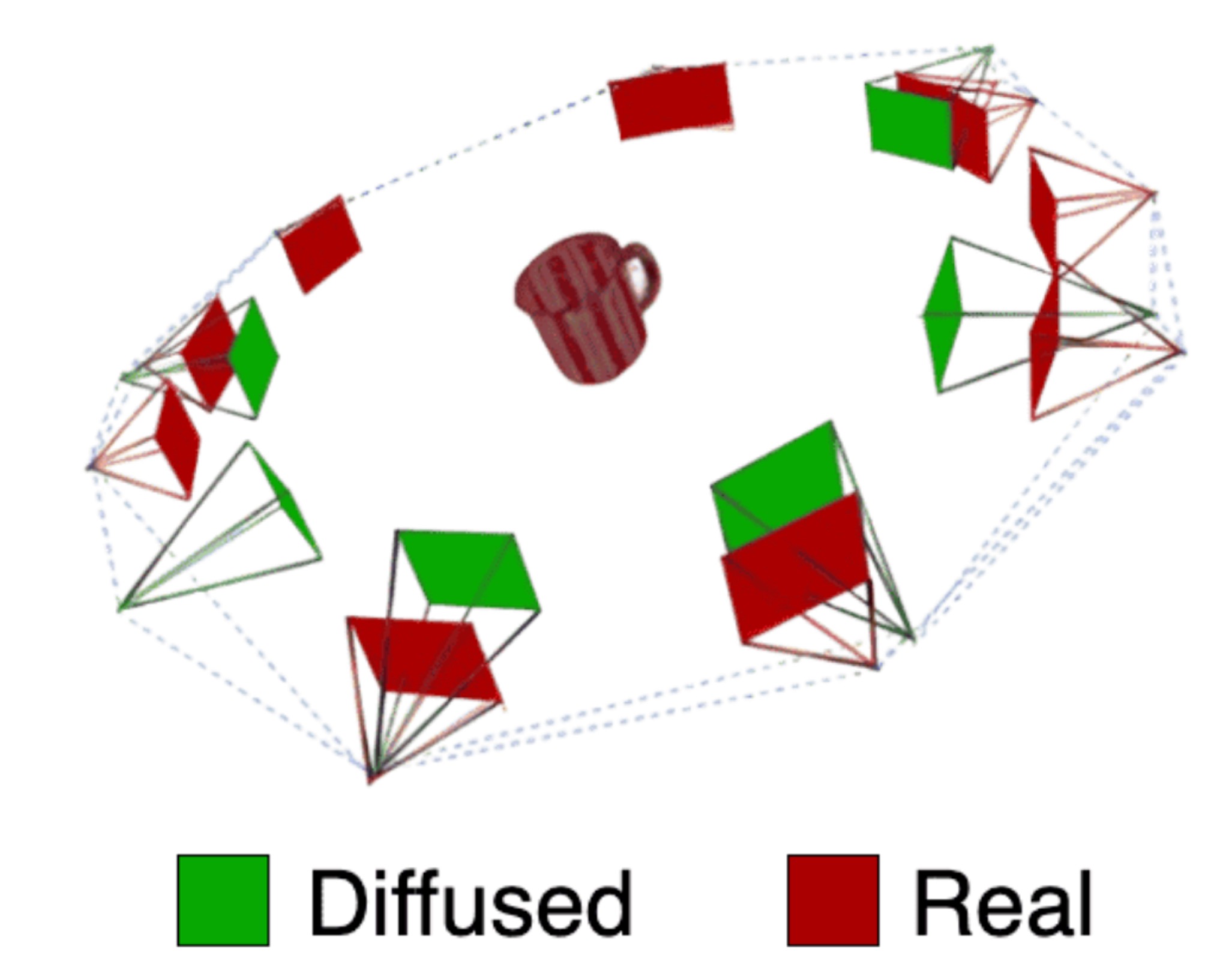
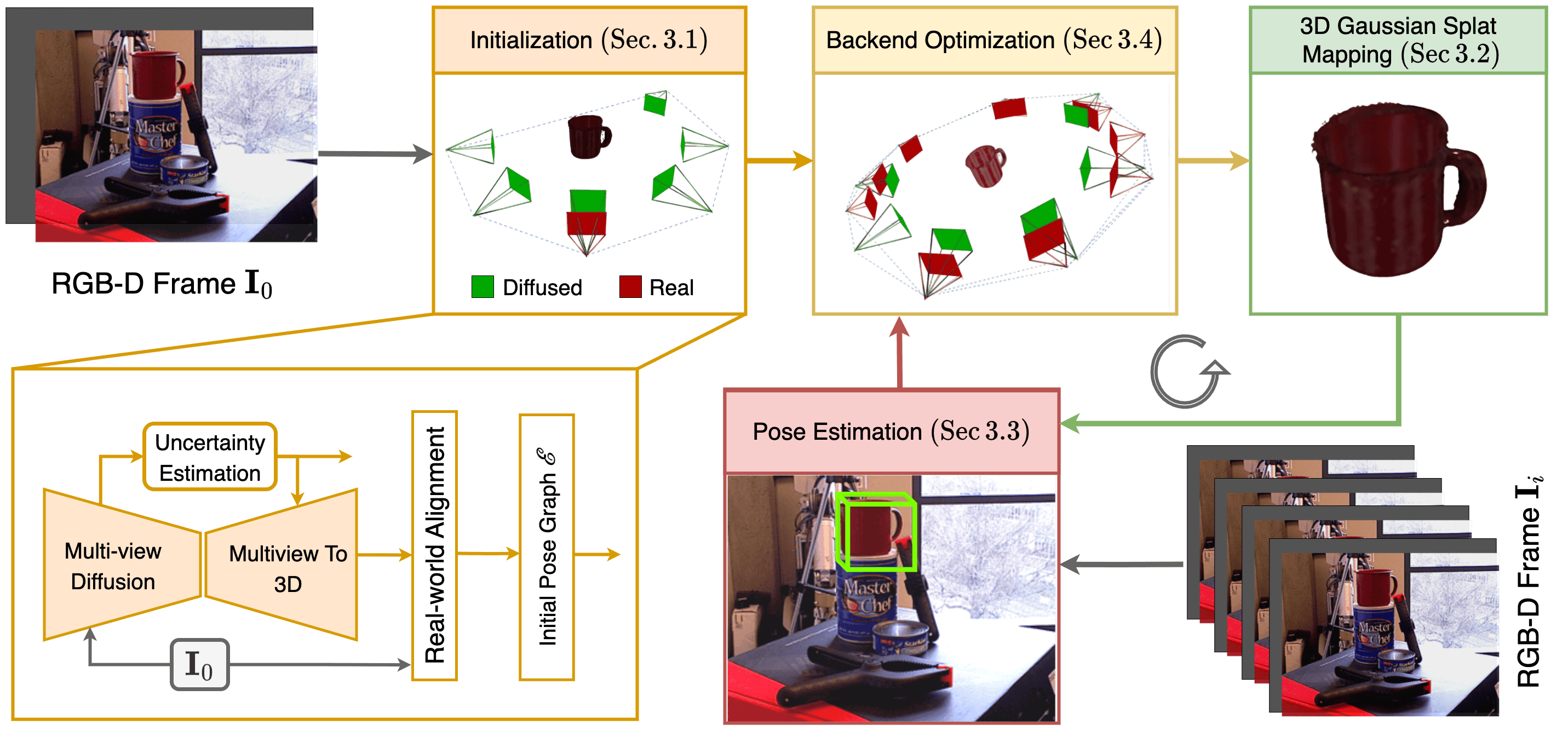
UnPose: Uncertainty-Guided Diffusion Priors for Zero-Shot Pose Estimation
Zhaodong Jiang, Ashish Sinha, Tongtong Cao, Yuan Ren, Bingbing Liu, Binbin Xu Conference on Robot Learning (CoRL), 2025 project page / arXiv We present a new model-free pose estimation framework by leveraging uncertainty-guided refinement to integrate new observations with diffusion priors. By formulating object model as an incremental optimizing factor graph, we achieve globally consistent reconstructions and significantly improve both 6D pose accuracy and 3D reconstruction quality over prior methods. |
|
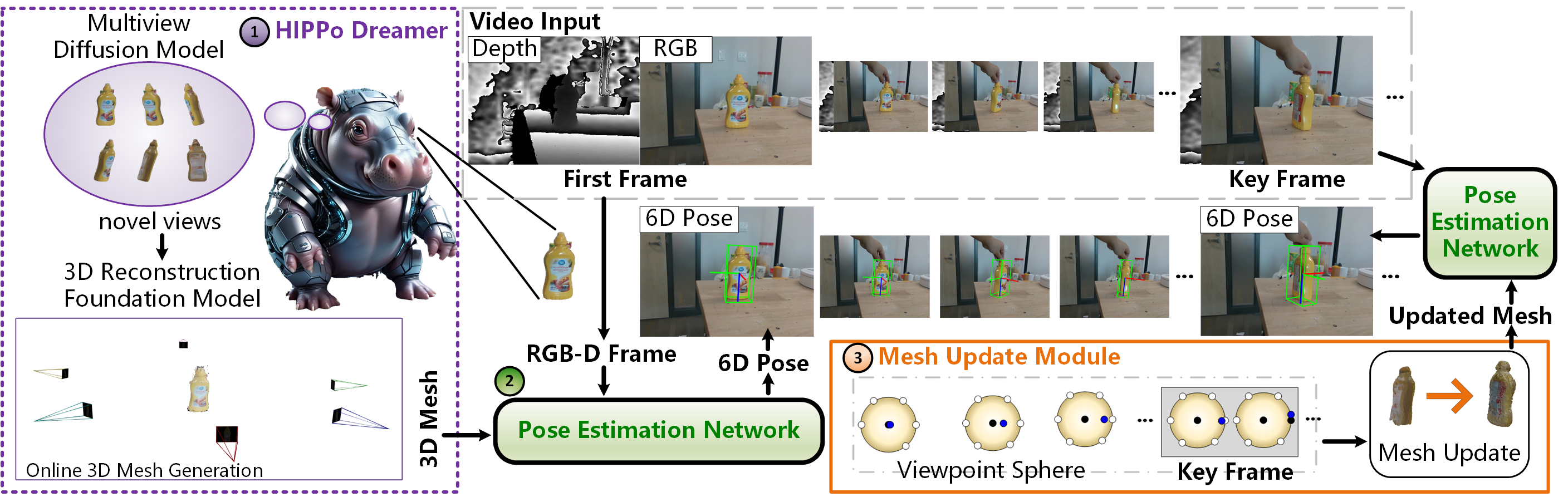
Hippo: Harnessing image-to-3d priors for model-free zero-shot 6d pose estimation
Yibo Liu*, Zhaodong Jiang*, Binbin Xu, Guile Wu, Yuan Ren, Tongtong Cao, Bingbing Liu, Rui Heng Yang, Amir Rasouli, Jinjun Shan IEEE Robotics and Automation Letters (RA-L), 2025 (ICRA 2026 presentation) project page / arXiv We propose HIPPo, a model-free framework that generates and refines 3D object meshes from a single image, enabling instant zero-shot 6D pose estimation for robotics |
Ongoing Project |
|
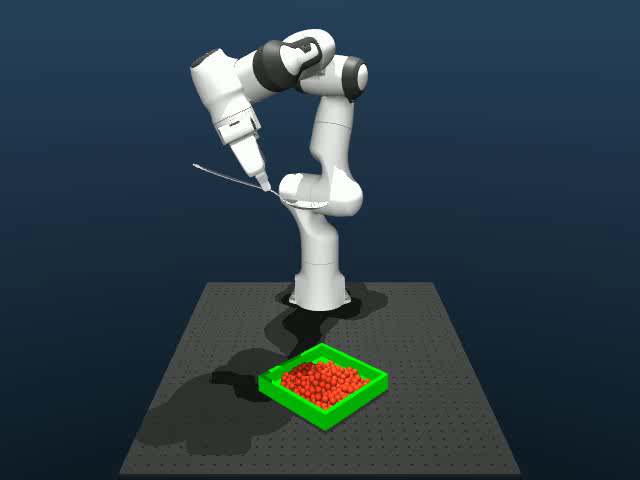
Granular Object Manipulation Benchmark
Zhaodong Jiang, Florian Shkurti Thesis code Stay tuned! We are developing a benchmark pipeline and dataset for granular object manipulation tasks in Mujoco, and we will benchmark state-of-the-art diffusion-based methods and VLA models on these tasks. |
|
Website template from Jon Barron. |